TP du 26/11/2014 – présentation par Didier.L
Rappels :
Les courants :
– AC : Alternative Curent / Courant alternatif (exemple : le 220v secteur)
– DC : Direct Current / courant continu (exemples : les piles et batteries)
Pour les fans de Hard Rock, le nom du groupe AC/DC viendrait de là, it’ a highway to Hell :-).
Le magnétisme :
Les aimants ont 2 pôles :
– Un pôle Nord (N) représenté en rouge
– Un pôle Sud (S) représenté en bleu.
Les pôles de signes opposés s’attirent tandis que les pôles de signes identiques se repoussent.
Les aimants sont présent dans les haut-parleurs, les jouets de construction de type magnet. Les aimants dits permanents exercent leur force magnétique sans avoir besoin d’aucune source d’énergie.
Les lignes de forces passent par l’axe de l’aimant. La force électromagnétique diminue avec la distance. Les lignes de forces décroissantes décrivent des spires de plus en plus larges autour de l’aimant.
Il est aussi possible de créer un aimant en faisant circuler un courant dans un fil bobiné (aussi appelé solénoïde). On parle alors d’un électro aimant.
En fonction du sens du courant dans le fil électrique de la bobine, on modifiera la position des pôles Nord et Sud de l’aimant.
On retrouve les électroaimants dans des objets de la vie courante comme les sonnettes, les relais électriques…
Un moteur électrique est compose d’aimants et d’électro-aimants.
Les aimants sont généralement repartis à l’extérieur, sur la partie fixe du moteur, cette partie fixe s’appelle le stator (statique : qui ne bouge pas).
Les électro-aimants sont au centre du moteur et tournent avec l’axe : cette partie mobile est appelé le rotor.
Pour faire tourner l’axe, on va envoyer du courant dans les bobines de manière à ce que les aimants et les électroaimants se repoussent et s’attirent successivement.
Dans l’exemple ci-dessus, si les bobines du rotor sont parfaitement alignées avec les aimants (position 3), le moteur ne peut pas démarrer et on ne pourrait pas dire avec certitude de quel côté il démarareait. Aussi, la plus part des moteurs bon marché ont des rotors qui comprennent au moins trois bobine (aussi appelées pôles).
++ plus : lorsque l’on arrête d’alimenter une bobine, elle va restituer une tension inverse au moins égale à sa tension d’alimentation et généralement plus élevée . Ce principe est utilisé pour produire des hautes tensions (des milliers de volts) dans une voiture à partir de la batterie de 12v. Cette tension est nécessaire pour provoquer l’arc électrique sur les bougies.
Ce courant de retour peut provoquer la destruction des composants, c’est pourquoi on associe généralement a une bobine une diode de manière à absorber ce courant.
Un moteur électrique est réversible : si on lui fournit du courant il tourne, mais a l’inverse si on le fait tourner il produit du courant. On parle dans ce cas de génératrice ou dynamo.
++ Ce principe est utilisé sur les moteurs du bras Ericc (la galerie photos) un petit moteur est positionnés en bout d’axe du moteur principal afin de déduire à partir du courant généré la vitesse du moteur principal (nécessaire pour l’asservissement).

+++ Plus la distance entre l’axe et l’endroit où opère le champ magnétique (entre le stator et le rotor) est importante plus le moteur aura de couple. Certains moteurs ont leurs bobines autour de l’aimant permanent. Ces moteurs ont un rendement très élevé, mais ils coutent chers car leur fabrication est délicate. La société Suisse Portescap est une des spécialistes de la fabrication de ces moteurs.

La vitesse d’un moteur électrique dépend de nombreux paramètres, et principalement du courant continu qu’on lui applique. En faisant varier la tension d’alimentation, on fait varier sa vitesse.
Lorsque l’on veut changer le sens de rotation, on inverse le sens de passage du courant d’alimentation. Pour réaliser cette opération on peut utiliser une solution mécanique : l’inverseur
On peut aussi utiliser une solution électronique : le pont en H (H comme la forme du schéma)
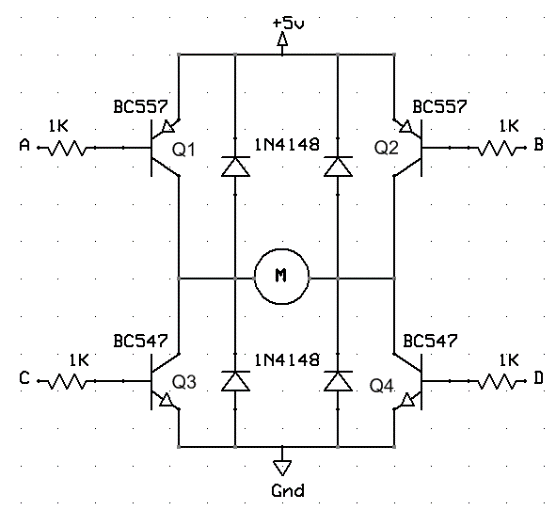
Ce montage revient à piloter 4 interrupteurs pour inverser le sens du courant.
Attention. L’inversion des interrupteurs doit se faire de manière synchrone. Les composants modernes permettent une vitesse de commutation suffisamment élevé pour éviter tout risque de retour de courant et destruction des circuits (cette commande se fait via des transistors type triac, MOSFET permettant de faire passer de la puissance ou des circuits intégrés type l298 ) plus 4 diodes anti-retour.
Il existe une autre grande famille de moteur : les moteurs dit pas a pas
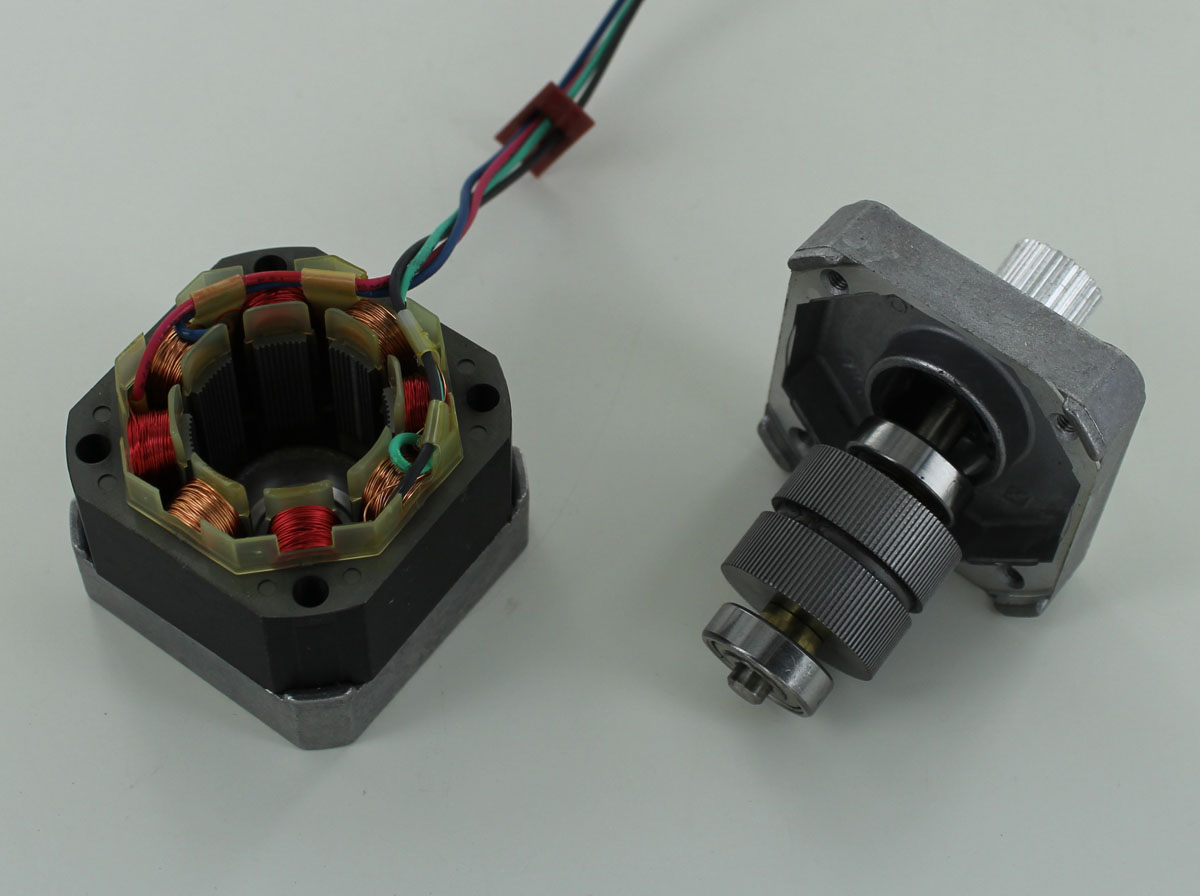
Ces moteurs permettent une rotation de quelques degrés. Ils sont facilement reconnaissable car ils possèdent a minima 4 fils d’alimentation, lorsque l’on les fait tourner manuellement on ressent (sur les plus puissants) chacun des petits pas qui correspondent aux positions où les dents du rotor sont en regard des dents du stator.
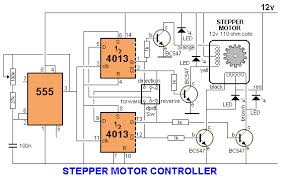
Ces moteurs sont constitués de plusieurs bobinages, il est nécessaire de les piloter avec un circuit électronique spécialisé.
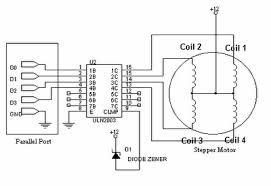
Le schéma ci-dessous représente un contrôleur mettant en œuvre des composants discrets (transistors, diodes, circuits logiques, et peut être remplacé par un simple et petit circuit intégré.
Ces circuits intégrés permettent un contrôle extrêmement précis de la rotation du moteur, à raison de ½ pas, de ¼ de pas, de 1/8 de pas et même de 1/16 de pas. Ils sont aussi capables de gérer l’accélération et la décélération du rotor.
 |
 |
Travaux pratique à suivre :
– Le hashage,
– Pilotage d’un moteur à courant continue avec pont en H (électronique pure),
– Pilotage avec l’arduino / inversion du sens de rotation,
– Démo par fabrice de l’intensité du courant induit dans une bobine.